Neseniai vienas iš JSR klientų, kuris buvo suprojektuotas pagal robotinio suvirinimo slėginio bako projektą, pritaikė jį individualiai. Kliento ruošiniai turi įvairias specifikacijas ir yra daug suvirinamų dalių. Projektuojant automatizuotą integruotą sprendimą, būtina patvirtinti, ar klientas atlieka nuoseklųjį, ar taškinį suvirinimą, o tada visiškai naudoja robotą. Tai turi būti padaryta. Šiuo laikotarpiu pastebėjau, kad jis abejojo dėl pozicionieriaus pasirinkimo, todėl JSR trumpai jį visiems pristatė.
Dviejų stočių vienos ašies galvinės ir galinės dalies vertikalus apvertimo pozicionavimo įrenginys
VS trijų ašių vertikalus apvertimo pozicionierius
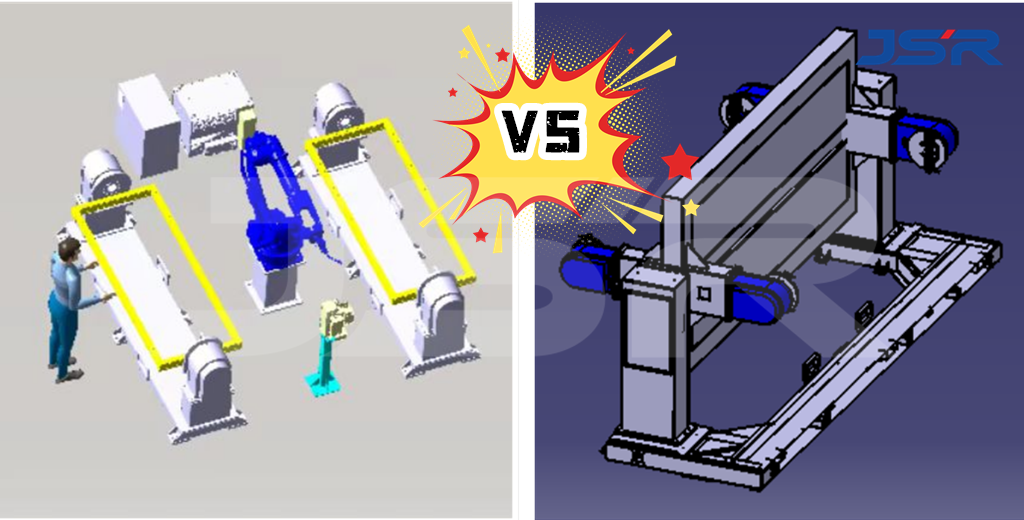
Robotinio suvirinimo darbo stotyje dviejų padėčių vienos ašies galvinės ir galinės dalies vertikalus apvertimo padėties nustatymo įrenginys ir trijų ašių vertikalus apvertimo padėties nustatymo įrenginys yra dvi įprastos padėties nustatymo įrangos, turinčios savų pranašumų skirtingose taikymo situacijose.
Toliau pateikiami jų taikymo scenarijai ir palyginimai:
Dviejų stočių vienos ašies galvos ir uodegos rėmo padėties nustatymo įrenginys:
Tai tinka tais atvejais, kai ruošinį reikia pasukti ir pozicionuoti suvirinimo proceso metu. Pavyzdžiui, automobilių kėbulų suvirinimo gamybos linijoje du ruošiniai gali būti montuojami dviejose stotyse vienu metu, o ruošinių pasukimas ir pozicionavimas gali būti atliekamas naudojant vienos ašies galvutės ir užpakalinės dalies padėties nustatymo įrenginį, taip pagerinant gamybos efektyvumą.
https://youtube.com/shorts/JPn-iKsRvj0
Trijų ašių vertikalus apvertimo pozicionierius:
Idealiai tinka sudėtingiems suvirinimo scenarijams, kuriems reikia sukti ir apversti ruošinius keliomis kryptimis. Pavyzdžiui, aviacijos ir kosmoso pramonėje reikalingas sudėtingas orlaivių fiuzeliazijų suvirinimas. Trijų ašių vertikalus apvertimo pozicionierius gali realizuoti ruošinio sukimą ir apvertimą keliomis ašimis horizontalia ir vertikalia kryptimis, kad būtų patenkinti suvirinimo poreikiai skirtingais kampais.
https://youtu.be/v065VoPALf8
Privalumų palyginimas:
Dviejų stočių vienos ašies galvos ir uodegos rėmo padėties nustatymo įrenginys:
- Paprasta konstrukcija, lengva valdyti ir prižiūrėti.
- Du ruošiniai gali būti apdorojami vienu metu, siekiant pagerinti gamybos efektyvumą.
- Tinka kai kurioms paprastesnėms suvirinimo užduotims, pavyzdžiui, ruošiniams, kuriems reikalinga viena sukimosi ašis.
- Kaina yra pigesnė nei trijų ašių vertikalaus apvertimo pozicionieriaus.
- Suvirinimas kaitaliojamas tarp kairiosios ir dešiniosios stočių. Virinant vienoje stotyje, darbuotojai turi pakrauti ir iškrauti medžiagas kitoje pusėje.
Trijų ašių vertikalus apvertimo pozicionierius:
- Jis gali realizuoti kelių ašių sukimąsi ir apvertimą, todėl tinka sudėtingoms suvirinimo užduotims.
- Robotinio suvirinimo metu darbuotojams reikia atlikti ruošinių pakrovimą ir iškrovimą tik iš vienos pusės.
- Suteikia didesnį padėties nustatymo lankstumą ir tikslumą, kurie gali atitikti įvairių suvirinimo kampų reikalavimus.
- Tinka ruošiniams, kuriems keliami aukšti suvirinimo kokybės ir tikslumo reikalavimai.
Apibendrinant galima teigti, kad tinkamo padėties nustatymo įrenginio pasirinkimas priklauso nuo konkrečių suvirinimo užduoties reikalavimų, įskaitant tokius veiksnius kaip ruošinio sudėtingumas, suvirinimo kampas, gamybos efektyvumas ir suvirinimo kokybės reikalavimai.
Įrašo laikas: 2024 m. vasario 20 d.
