Pramoniniai robotai pasižymi itin dideliu lankstumu ir tikslumu, mažais reikalavimais darbo aplinkai, tvariu veikimu, stabilia gaminių kokybe ir dideliu efektyvumu. Gamykloje buvo įdiegti „Yaskawa“ 6 ašių apdorojimo robotai GP12, skirti automatinei surinkimo linijos pakrovimo ir iškrovimo sistemai sukurti.
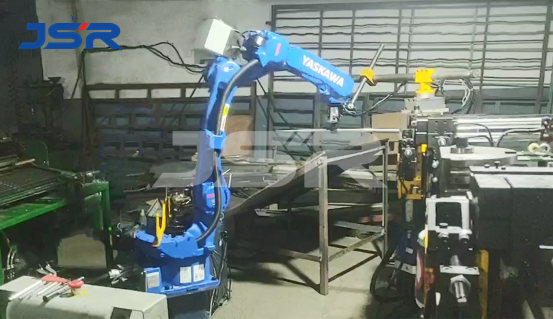
Tai įmonė, prekiaujanti dviračių dalimis, o GP12 dirba su dviračių vairo pakrovimu ir iškrovimu. Jam reikia perkelti plieninį vamzdį iš taško A į vamzdžių lenktuvą. Po apdorojimo vamzdžių lenktuvas jį išima ir perkelia į tašką B. Jį reikia paimti tiksliai.
Programos įgyvendinimas:
1. Inžinierius turi atlikti pagrįstą išdėstymo planavimą ir konstrukciją pagal faktinę kliento objekto darbo aplinką.
2. Signalų sąveikos laidus junkite pagal lauko išorinės įrangos ir roboto reikalaujamus signalus.
3. Užprogramavo roboto loginę programą ir išmokė robotą judėti trajektorija.
4. Programos bandymai atitinka valdymo reikalavimus ir gamybos poreikius.
5. Užbaigtas diegimas ir derinimas vietoje, taip pat klientams teikiami įrangos naudojimo mokymai.
6. Po kelių dienų darbo vietoje esanti įranga neturi jokio gedimo rodiklio, kuris gali patenkinti gamyklos 24 valandų nepertraukiamą gamybą.
Tvarkymo robotas sumažina darbuotojų darbo intensyvumą, pagerina gamybą ir darbo efektyvumą, užtikrina darbuotojų asmeninį saugumą ir realizuoja automatizavimą, intelektą bei humanizavimą. Jiesheng yra pasirengęs kiekvienam klientui teikti individualius pramoninių robotų automatizavimo sprendimus.

Įrašo laikas: 2022 m. lapkričio 9 d.
